
Project Definition
Planning
The CanSat Competition is an international design/build/fly engineering competition taking place at Virginia Tech University. In this year’s mission, the CanSat will be launched to 700m using a high-powered model rocket and then perform a controlled descent while transmitting data from its onboard sensors to a ground station computer. The CanSat consists of a container and science payload. Initially, both descend under a parachute. At 450m, the payload is released and continues its descent as a delta wing glider. The glider then descends in a circular pattern of radius 250m for one minute while staying above the altitude of 100m. Finally, the delta wing glider releases its own parachute and descends at 10 m/s back to the ground.
Problem Statement
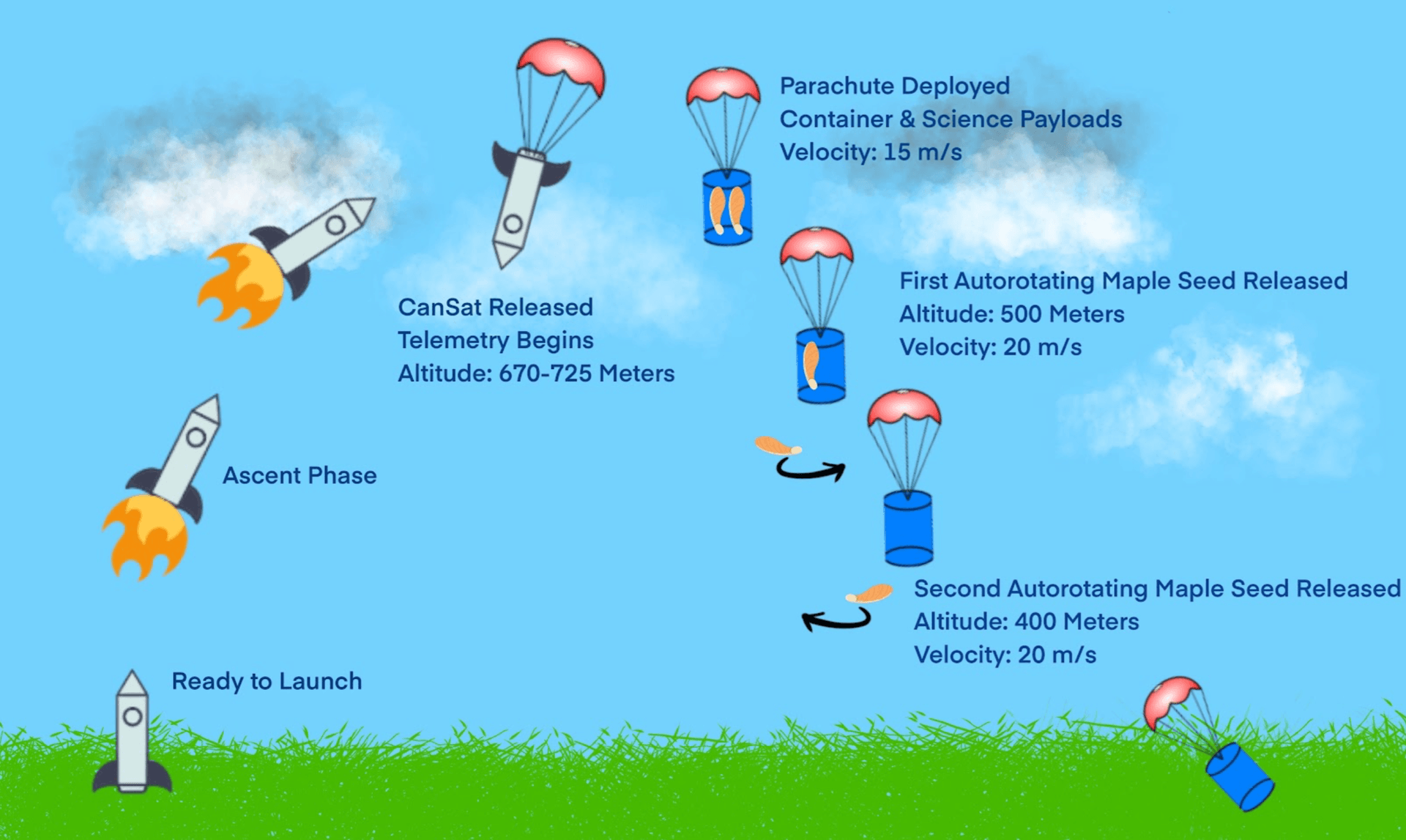
Our CanSat project for the competition involves designing and building a container and science payload that descend from 670 to 725 meters. Initially, both parts descend together under a parachute at 15 m/s, then the first payload is released at 500 m, rotating to descend at under 20 m/s, followed by the release of a second maple-seed payload at 400 m. Equipped with sensors for air temperature, pressure, and rotation rate, the payload transmits data to the container, which relays all information and includes GPS, pressure, battery voltage, and an audio beacon. Our goal is to excel in the CanSat Competition, ensure all team members gain hands-on engineering experience, and meet both the MAE Department's senior design requirements and UCI’s standards in design reviews. The competition provides a high-power rocket for standardized launches, and our container is designed to protect the payload throughout launch and deployment.
Team Goals
Design and build a CanSat that meets all competition requirements.
Provide all team members with practical experience in the engineering design process.
Fall: Complete research, design, resource procurement, and initial prototypes; submit Preliminary Design Report.
Winter: Focus on manufacturing, refining designs for prototype two, and completing the Critical Design Review (CDR).
Spring: Conduct testing, address any issues, and prepare for competition after finals.
CanSat Competition Requirements
Major Components
While there are 66 requirements published by the CanSat Competition. The most important requirements regarding CanSat's design are listed below:
- CanSat must include sensors for temperature, pressure, GPS, altitude, particulates, orientation, and battery voltage, adhering to competition specifications.
- Real-time data transmission to a ground station, including a primary and backup laptop, handheld receiver, and XBEE radio.
- Data packets must be sent wirelessly, plotted on a GUI in real-time, and saved as a .CSV file for post-flight analysis.
- Project scope includes only CanSat and ground station design and build; the high-power rocket launch system is provided by the organizers.
- CanSat container must protect the payload during launch and deployment.
Senior Subsystem Design

Figure: CanSat Sensors placed on the PCB
Most of the CanSat sensors are soldered directly onto the custom printed circuit board (PCB). The battery voltage measurement is integrated onto the PCB. The MS5611 provides altitude, temperature, and pressure readings. The XA1110 provides GPS latitude, longitude, altitude, and time. It can report the number of GPS satellites tracked. The 5525DSO provides readings of airspeed, which works in conjunction with a pitot tube. The GP2Y1010AU0F provides particulate concentration readings.
Descent Control Design
Parachute (Container and Payload Descent Control System)
1.
The container parachute is 13.3 cm with a 1 cm spill hole to reach 20 m/s. This spill hole will help stabilize the descent and reduce drifting.
2.
Both will be dome parachutes made of 30d Silicone Nylon 66 Cloth
3.
Compression spring launches payload from canister

Figure: CanSat Sensors placed on the PCB
Delta Wing Glider (Payload Descent Control System)
1.
Canister parachute sits on top of canister and payload
2.
When ejected from the rocket, parachute is immediately deployed
3.
Payload parachute is stored in a release box triggered by a nichrome wire switch

Figure: CanSat Sensors placed on the PCB
Delta Wing Glider (Payload Descent Control System)
1.
Glider will be made compoundly of fiberglass and 3-D printed ABS material
2.
Joint areas will be made from ABS while flat areas of wing will be replaced with thin layers of fiberglass
3.
Glider wings will be rigid and each incorporate a two stage folding mechanism to be stored within the container
4.
Glider has been designed to achieve a vertical velocity of 4.59 m/s which vertically displaces the glider 275.4 m in one minute

Figure: CanSat Sensors placed on the PCB
Mechanical Subsystem Design

This displays an overview of our mechanical subsystem. The payload structure is made from a 3D printed ABS components that consist of a base plate, as well as electronic, battery and air particle sensor mounts. The base plate also stores servo motors that rotate the wings about their hinged axis’. The two part folding wing design is made of joint fiberglass- ABS material design to reduce weight. The canister is designed to fall horizontally and contains a compression spring loaded piston mechanism for easier deployment from the canister. The canister itself has two 3D printed ABS end caps as well as a LDPE sidewall sheet. The payload is ejected from the canister using a nichrome wire release switch, along with a fishing wire that runs through both the canister and payload.
Payload Structural Elements
1.
3D printed mounts to hold PCB, battery and servo
2.
Base plate with mounting holes
3.
Two part folding wing design
4.
Retractable horizontal stabilizer
Material Selection
1.
Thin flat plate fiberglass wings, connected to 3D printed rotating joints
2.
Steel slotted spring pins and music wire torsion springs
Canister Structural Elements
1.
ABS top and bottom caps
2.
Compression spring piston deployment mechanism
3.
Horizontal descent orientation
4.
Nichrome wire release mechanism
Electrical Power Subsystem Design
1.
The EPS has two power rails: 6V for motors and other high power devices, and 3.3V for low power devices.
2.
The main battery is a 6V, 350mAh, NiMH battery. An RTC battery allows the GPS module to keep time.
3.
A buck converter is used to convert 6V down to 3.3V.

Figure: Diagram of the Electrical Power System components
Flight Software Design

Figure: Diagram of the Electrical Power System components
Glider
1.
The EPS has two power rails: 6V for motors and other high power devices, and 3.3V for low power devices.
2.
The main battery is a 6V, 350mAh, NiMH battery. An RTC battery allows the GPS module to keep time.
3.
A buck converter is used to convert 6V down to 3.3V.
Ground Station
1.
The EPS has two power rails: 6V for motors and other high power devices, and 3.3V for low power devices.
2.
The main battery is a 6V, 350mAh, NiMH battery. An RTC battery allows the GPS module to keep time.
3.
A buck converter is used to convert 6V down to 3.3V.
Ground Control System Design

